 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|

 |
|

 |
|
 |
|
 |
|
 |
|
������������ֻ�������������γ������������о�(һ)
������������ֻ�������������γ������������о�(��)
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||
������������ֻ��������������γ������������о�(��)
2 ������������ֻ������о�
2.1 ����
������������ֻ��������ص㣬����������ͳ������������۵ķ����Ƶ���任�������ù��������Ĺ��ܹ�ϵ��������ֵ�����������ڼ�������ɽ���������������еĸ������⣻�������ά�����ͣ��㷨�����ܽ�����ĸ�������⣬���ܴ�������ĸ�����������⣬ʵ�������������ϵĹ�����������ֻ������������������ֻ������ֻ��ķ��������̡�
��ͳ�Ĺ���������ⷽ���ǻ��ڽ�������ʽ��������֪���棬ͨ���˹��Ƶ����õ���������Ľ������̻�����[78-83]������֪������һϵ����ɢ���ݵ�������ʱ�����ַ����������ã�Ҳ����˵�������÷�Χ�кܴ�����ԡ���һ���棬��Ϊ������������漰�����Ĺ�ʽ�Ƶ��ʹ�������ѧ���㣬��һ��Ĺ��̼�����Ա��˵��������һ�����ۺͼ��㷽����һ���Ѷȣ������˹����㣬��һ��Ĺ��̼�����Ա��˵���ƾ���һ�����ۺͼ��㷽����һ���Ѷȣ������˹���������׳��������Թ������ļ���������б�Ҫ�ġ��������ü�������ʵ�ַ��棬���ڽ�������ʽ�����Ƶ�����Ķ���������ͳ�Ĺ�����ⷽ��Ҳ���ѽ���ͨ���Խ�ǿ�ļ�����㷨��
����ּ��ͻ����һ���ޣ�һ����ʹ���������������֪����Ϊ���ֻ�������������Ȼ�ܹ�Ӧ�ã����ؿ�������������÷�Χ����һ���棬���ӹ������������Զ����̶ȣ�ʹ�ôӵõ���֪�������ݵ���˶���������������������һ���̶������ɼ�����Զ���ɣ��û�ֻ�øı���������Ϳ��Է���صõ����ֹ������档
2.2 ���ֻ��������������������ԭ���ڹ���
������������ֻ��������������γ������������о�(��)�������������棬���ǽ������棬�ڶ�����й������۵��о��У������ϵ�빲���������о��Ļ�������Ҫ���ݡ�
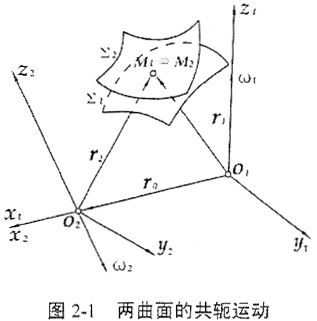
��ͼ2-1��1����2Ϊ��������������棬���Ц�1��Ϊĸ��ǰ��S1��o1x1y1z1����S2��o2x2y2z2��Ϊ�����ֱ��릲1����2�����������ϵ��r1(1)��r2(2)�ֱ��ʾ��1����2��һ���λ��ʸ��N1(1)��N2(2)�ֱ��ʾ����1����2��r1(1)��r2(2)���㴦�ĵ�λ��ʸ�������������ϱ��ʾ����������꣬�±��ʾ���������档
��ĸ���榲1������ϵS1�пɱ�ʾΪ��u��vΪ�����ķ���
r1(1)=r1(1)(u��v) (2-1)
�����榲1����tΪ�����Ĺ��ɱ仯���ڿռ��γ�һ�����壬��������ķ�����Ϊ
{��1}��r1(1)=r1(1)(u,v,t) (2-2)
u,v��ĸ����ļ��β�����t��ĸ����ı仯��������ĸ������״�仯ʱ��t��Ϊ�˶������������е�t��Ϊ�������˶�������
������һ���榲2��������{��1}����һ�����Ц�1����һ��������L����M��Ҳ�ƽӴ���Ӵ��㣩���ڹ�����ÿһ����M�Ϧ�2�릲1���й���������ߣ����榲2��Ϊ������{��1}�İ��磬������2�릲1��Ϊ�������棬���ֽӴ��������Ϊ����Ӵ�״̬�������
���榲1�릲2Ϊ��ʵ�ֹ���Ӵ��˶�������������������»���������
��1�����榲1����2�����Ӧ�ĽӴ��㣨����㣩M1��M2�����غ�Ϊһ�㣨��ͼ2-1������
r2=r1-r0 (2-3)
���ھ���ʵ�����⣬ʽ��2-3����ȼ���r1(2)=r2(2)(u��v��t)��
(2)�������ڽӴ����У����ڽӴ����й����ߣ���������Ӧ�������һ��Ӵ�����
N1=-N2 (2-4)
��3���������ڽӴ���������ٶ�v12Ӧλ�ڸô��Ĺ������ڣ��Ա�֤�����Ӵ��������·���Ƕ������״̬����
N��v12=0
�� (r,u��r,v)��r,t=0 (2-5)
ͨ���ƣ�2-5��ʽΪ�������꣨�������������
������������ֻ��������������γ������������о�(��)�ɣ�2-3������2-5����ʽ������⣬�������ĸ���榲1�Ĺ�����Ϊ��2���༴�ɹ���������2-5������˶�����t��ĸ����ļ��β�����u,v��֮��Ĺ�ϵ��t=t(u,v),Ȼ����루2-3��ʽ�����ɵõ��������榲2��r2(2)=r2(2)(u��v)��
��Ȼ������ĸ����Ϊ�������棬ʵ���㷨�൱���ӣ��������������������棬���ǽ������棬�����յõ��Ĺ��������Ϊ��ɢ���������档
2.2.2 ���ֻ�����������������ԭ��
���ڽ�������Ĺ����������ۣ������ǹ�������������Ӵ������ľ�ȷ��Ч�Ĺ��ߡ����ǣ��������۴���������ȱ�ݣ�һ���������ͼ��α任���ӣ����㹤������ʹ�ü�����������Ͷ�̬�Ż�������൱�Ѷȣ����Ƕ��ڷǽ�����ʽ����ɢ���������棬��ͳ�Ļ��ڽ������۵Ĺ�������ԭ�����������������Ϊ�������ڴˣ����������������ֻ��������Խ���ִ�������ơ����ּӹ��������ַ����е����⡣
���������������������뷽���ǹ�����������ֻ������ĺ������ݣ����Ļ���˼���Ǵ����ֻ���ɢ���������Ӧ����ֵ�����ֶν���������ֱ��ز�ͬ�ķ���u��v����һ�������Ͼ��ж�����������������������ֵ������������˫���β���������һ�㼸�����ʵ������˻�Ϊ���ھ��е����β������������߽��㼸�����ʵ��о��������������˶������еĹ����ϵ��������������Сֵ�����ֹ滮ģ�ͣ�Ӧ���Ż��㷨��������������ĸ���榲1�����������榲2��
2.3 ������������ֻ����
���ֻ����湲��������������ؼ��������������������N��������v12�����ڽ�Χ������������չ�����ۡ�
���ֻ������ϵĵ�����ɢ�ģ����ǿ��Ը����˶������ֱ�������ÿһ�����˶����ԣ����ÿһ�������˶������ж�Ӧ�Ĺ�����λ�ã�����еĻ�������ô�����еĹ���㶼�������Ҳ����Ȼ��Ȼ����������֪���ֻ������Ӧ�Ĺ������棬��������ֻ�����������������˼·��
���ڹ��������������У������ĵ㼰�䶯���������ṩ��������ȫ�����������������ڸõ�ķ�����N���ڿ��������ϵ�������˶�����֮ǰ���б�Ҫ������������������ֵ�����ڼ�ӵõ�һ�����������棬�Ӷ���ȡϰ��֪�����ijЩ�������ԡ���Է�����N����⣬��������������ֱ�Ľ�ά��ֵ�������������㹲������Ҫ���ṩ��֪������һ��ķ�����N����ͬʱ�������ٲ�ֵ�ļ�������
���˷�����N�⣬������������е���һ�����������������һ����˶��켣��������v12���������������ά������������Ķ�Ӧ��ϵ�����������v12����ⷽ����
2.3.1 ������N�����
������������ֻ��������������γ������������о�(��)
�����ֵ���ٵ���Ҫ�����Ǽ��������������������֪�����������乲������Ľ�ά��ֵ�����������߲�ֵ��������ֵ��
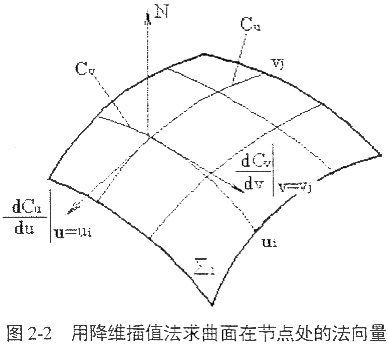
��ά��ֱ�����Ǵ���֪�����ֻ���ɢ�������������������ֱ�����ͬ�ķ���u,v����һ�������Ͼ��ж�����������������������ֱ���ߡ���������IJ�ֱ�����ڽ����������������������������ֻ���������һ��ķ�����N����ͼ2-25��ʾ����������������ֵ��Ψһ�ԣ������߲�ֵ����õķ���������ȵġ�Ȼ������������˶����̵Ĺ���������������⼫Сֵ��ѧ�滮ģ�ͣ�Ӧ���Ż��㷨�������������֪�������榲1���������ֻ����榲2��
�������ͽ�����˫���β�������һ�㼸�����ʵ�����ת��Ϊ���ھ��е����β������������߽��㼸�����ʵ��о����Ӷ������˼���ĸ��ӳ̶ȡ�
��u����Ϊ����������������ֵ��
����u�����n+1�����ݵ㣨ui��fi������i=0��1����,n�����������������ֵ����S��x����������������
��1��S��ui)=fi,i=0,1,��,n��
��2����ÿһ��С����[ui,ui+1]�������ζ���ʽ��
��3��S(ui)��C2[a,b],[a,b]Ϊ������ֵ���䣬����ֵ�������������������Ķ�������
��ֵ����ʽ�������Է������ʾ��
(1-��i)Mi-1+2Mi+��iMi+1=6f[ui-1,ui,ui=1],i=1,2,��,n-1�� ��2-6��
ʽ�У�![]() ��ʾS��x���Ķ�������ui��ֵ��
��ʾS��x���Ķ�������ui��ֵ��![]() ��ʾ���ײ��̡����ǹ���
��ʾ���ײ��̡����ǹ���![]() ����������飬����n-1�����̣���δ֪��������n+1��2��һ����ø��ӱ߽�������������Ķ������̣���������Ψһ��ȷ����
����������飬����n-1�����̣���δ֪��������n+1��2��һ����ø��ӱ߽�������������Ķ������̣���������Ψһ��ȷ����
���ݸ�������֪�����ϵĹ��c����ֵ���քe��u=ui��v=vj������ڼ��β���u,v�����������庯����![]() ���������ڵ�(ui,vj)���ķ�����Ϊ
���������ڵ�(ui,vj)���ķ�����Ϊ

�������ý�ά��ֵ���Ϳ��������������һ�ڵ㣨ui,vj�����ķ���������������������˶���ϵ��ͨ������任���Ϳ���������˶������ж�Ӧ����t�������У�ui,vj���ķ�������
2.3.2 ����˶��ٶ�v12�����
�����˶���t�ı仯����֪���榲1��δ֪���榲2������ϵS2�е��˶��켣�γ�������{��1}����{��1}ͨ������任�����ɵõ���1��S2�ж�Ӧ��ÿһ��t��λ�����꣬����Щλ�ü�¼�����͵õ��˦�1��S2���˶����γɵ������塣
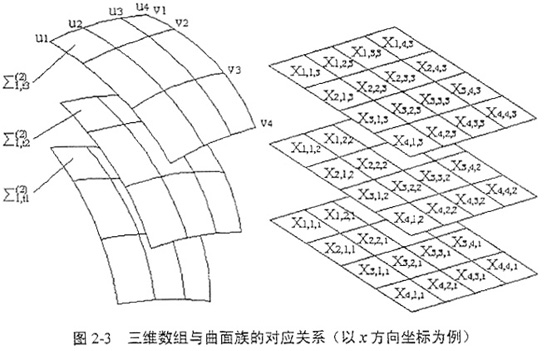
����֪���榲1��һϵ����ɢ������ֵ��ʾ������������ֵϵ�п���д�ɶ�ά����ɵ���ʽ����ά�����еĸ�ά�ֱ��Ӧu,v�α�������ά�����еĸ�Ԫ�طֱ��Ӧ�����Ͻڵ�����ꣻ��ô�����榲1������S2���˶��γɵ�������{��1}��������ά�����ʾ����ά����ĸ�ά�ֱ��Ӧu,v,t�α����������������еĸ��������ά����ĸ���Ԫ���ڿռ�ṹ���ǡ�����Ӧ�ģ���ͼ2-3��ʾ��
�����ά����ΪM����ȡt��tkʱ��M�˻�Ϊһ����ά���飬����ʾ������{��1}�ж�Ӧt=tk�����棻���������֪������һ�㣨ui��vj��,��ȡu��ui,v��vj����M�˻�Ϊһά���飬����ʾ����һ�㣨ui��vj��������ϵS2�ж�Ӧ���˶�����t��һϵ��λ��������Ҳ���㣨ui��vj��������ϵS2�е���ɢ�˶��켣��
������ȡ�õ㣨ui��vj������ɢ�˶��켣�����������������߲�ֱ���Ϳ��Եõ���tΪ�Ա�������������Ct(t)������ʾ��������˶��켣��Ȼ����ȡCt(t)���˶�����t�ĵ��������Ϳ��Եó��㣨ui,vj���˶��켣��������������
��ôt=tkʱ�㣨ui,vj���˶��켣��������Ϊ
![]()
��Ҳ�������榲1��һ��(ui��vj)��t=tkʱ��������榲2���˶��ٶȡ�
2.4 ���ֻ������������ģ�����㷨
2.4.1 ��ѧģ��
�����������������湲�������ؼ�������ⷽ�����������µĹ������������ѧģ��

ʽ��
r1(2)(u,v,t)������֪���榲1������ϵS2���γɵ������壻
N(u,v,t)����������ϵS2�У���Ӧ�˶�����t����֪���榲1�ڵ㣨u,v���ķ�������
v12(u,v,t)����������ϵS2�У���Ӧ�˶�����t�Ħ�1�ϵ㣨u,v��������˶��ٶȡ�
2.4.2 �㷨ʵ��
��1������uiֵ��
��2������vjֵ��
��3����ǰ������������榲1�ڵ�(ui��vj)�ķ�����N(ui��vj)��
��4��������任���N(ui��vj)��Ӧ����t���е�������ϵS2�е�һϵ��ֵN(ui��vj,t)��
��5����ǰ����ܵķ�������㣨ui��vj��������ϵS2�У���Ӧ����t���е�����˶��ٶ�v12(ui��vj,t)��
��6��ȡ��(ui,vj,t)=N(ui,vj,t)��v12(ui,vj,t),�õ���Ӧ������t���е�һϵ��ֵ���ڴ˻����ϣ��ò�ֵ�ķ����õ�һ����tΪ�Ա���������������(t),Ȼ�����ʹ��(t)=0ʱt��ֵtk��
��7����u=ui,v=vj,t=tk���루2-9���е�һʽ���͵õ���֪������1�ϵ㣨ui,vj������Ӧ�Ĺ������榲2�ϵĹ����r2(ui,vj)�����������������ֵ���棻
��8��vj��vj+��v,ת����2����ֱ��v���������ϣ�
��9��ui��ui+��u,ת����1����ֱ��u���������ϡ�
ͨ���������㣬�͵õ��˶�Ӧ����֪���榲1�Ͻڵ��һϵ�й���㣬������Щ��ɢ�Ĺ����ͱ�������Ҫ��Ĺ������榲2��
�ڼ����У�����㣨ui,vj��������t���˶������ж�û��ʹ��(t)=0,����жϴ˵�û�в��빲��ڹ����������������õ㣻����㣨ui,vj��d������t���˶������г���һ��ʹ��(t)=0������жϴ˵��������˶������в�ֻһ�β����˹��������֪���������㡰һ�Զࡱ��ӳ��ᵼ�³����жϵ����ң������������ʹt�Զ��ֶκ͵ݹ���ù�����⺯���ķ�����������ֱ����ÿһ��t�ķֶ��У��õ㣨ui,vj�����빲��Ĵ���������һ�Ρ�
2.5 ��
������������ֻ���������ĸ��������ԭ������������ֵ������������������������ʼ������ϵ�빲����������������ֻ����湲������У��������������N��������v12�����ֻ�������⣬���������ֻ��������ģ�ͺ��㷨��